
The project focuses on understanding the elastic capabilities of wood veneers and applies it to robotic fabrication for the realisation of glue laminated bent elements. This research project bridges computational design methods to robotic fabrication procedures with the aim of delivering an integrative process able to convert an input digital geometry to its physical product.
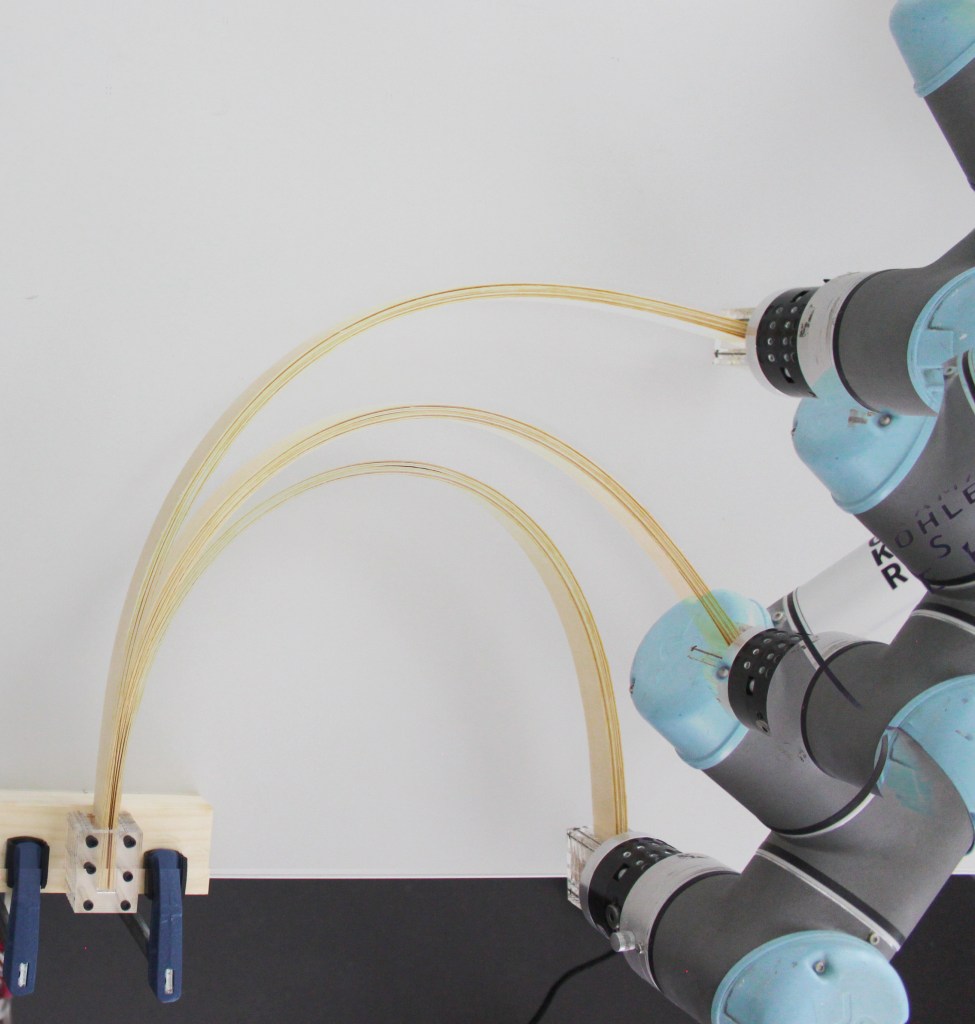
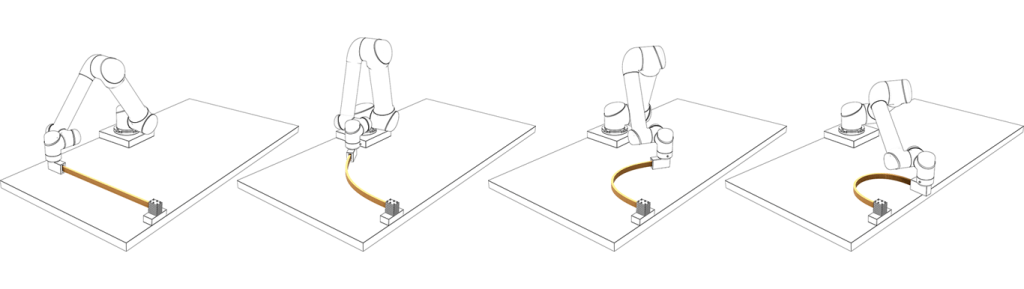

A feedback system based on image capturing and manipulation methods allow for a more precise bending operation. This iterative process adjusts the position of the robotic arm at every iteration, reducing building tolerances and providing more accuracy in the geometrical representation.

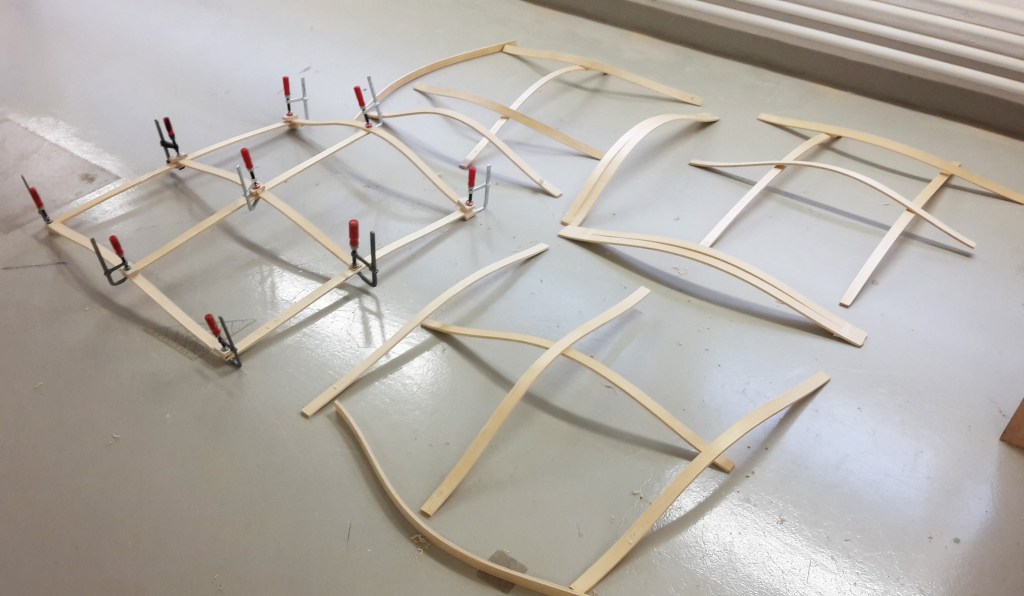
Prototype

